پاسخ : عکس های رباتيکی
سلام :)
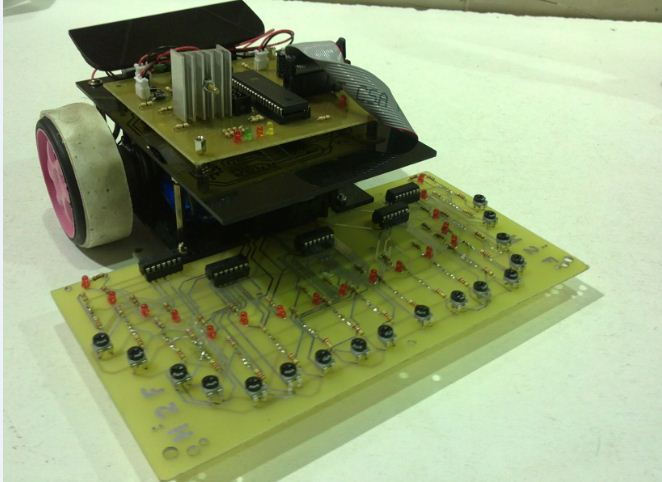
عکسی که از روبات هست مال زمانیه که ما میخواستیم بریم فرزکاپ، فک کنم یه ماهی میشد که شروع به ساخت روبات کرده بودیم اما فقط همین یکی رو داشتیم (هم در نقش مهاجم هم دروازه بان! )
چند تا نکته ی جالب که تفاوت این روبات با بقیه ی روباتا تو اون ها بود!
برد روبات، PCB نیست! برد هزار سوراخه! که البته کار زیادی هم برده

اما خب مثل برد PCB نیست که بسوزه و این مشکلات رو نداره!
تو برد، از آی سی l298 (جایگزین l6203) همینطور از رگولاتور 7805 (جایگزین DC/DC) استفاده شده!
روبات فاقد هرگونه compass یا سنسور فاصله هستش ! یعنی نه مکان یابی داریم نه جهت یابی! تنها تعقیب توپ! همین باعث میشد هرتیمی که با ما بازی داشت خیلی خوشحال باشه! از بابت گل های خودی زیادی که ما می زدیم!
(هیچکس حق نداره مسخره کنه ها!


وگرنه من حلالش نمیکنم
اما شوخی کم، واقعا یه ماه وقت مناسبی و کافی ای برای تازه کار هایی مثل ما نبود تا یه روبات کامل رو ارائه بدن)
سنسورها داخل لوله خودکار قرار گرفتن که با وارنیش مشکی دورشون پوشونده شده، نسبت به کارتون پلاست که اکثر تیم ها به این منظور ازش استفاده میکنن، بهتر نویز میگیره
موتور ها زیر شاسی روبات نصب شدن، که البته این هم کار درستی نبود و معایبش نسبت به مزایاش بیشتر بود، مثلا تو این حالت روبات خیلی راحت چپ میکنه !
LCDرو هم اگه میبینین اون جوری وصل کردیم به خاطر اینه که پشتش جا نیست!
در رابطه با سنسورهای شماره 3 و 7 و 11 هم هرکس تشخیص بده زیرشون چیه! جایزه داره!
که البته تو این عکسا کاملا واضحه که چیه! ایده از من بودا!
عکس










)")

")